Prototype Mechanical Redesign
Over the past weeks the robot has physically changed dramatically with the goal of minimising the footprint of the robot. While additional work is still required for the robot end effector the traversal system has been completely designed, reviewed, and should begin manufacturing as soon as possible.
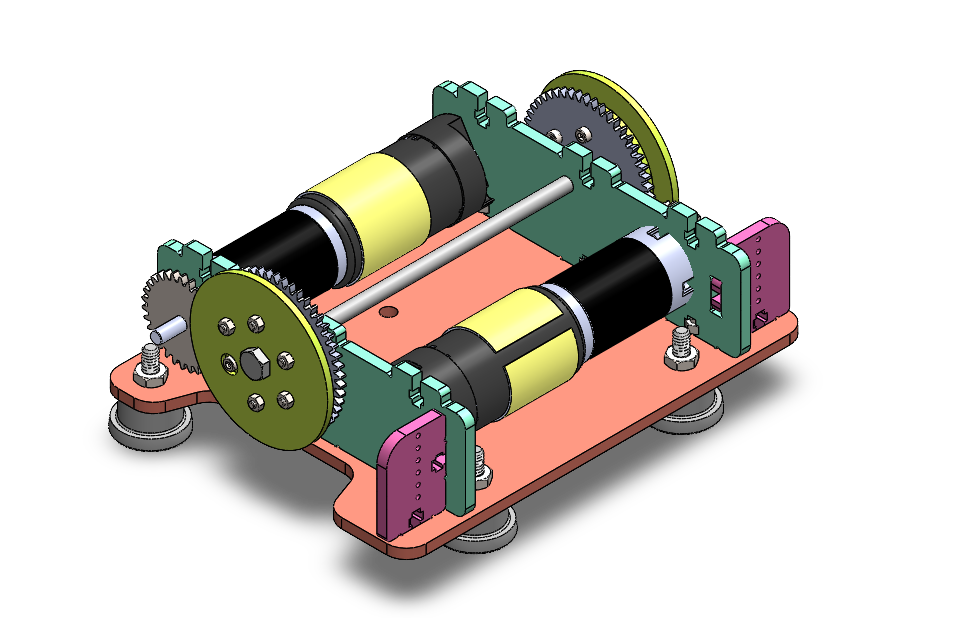
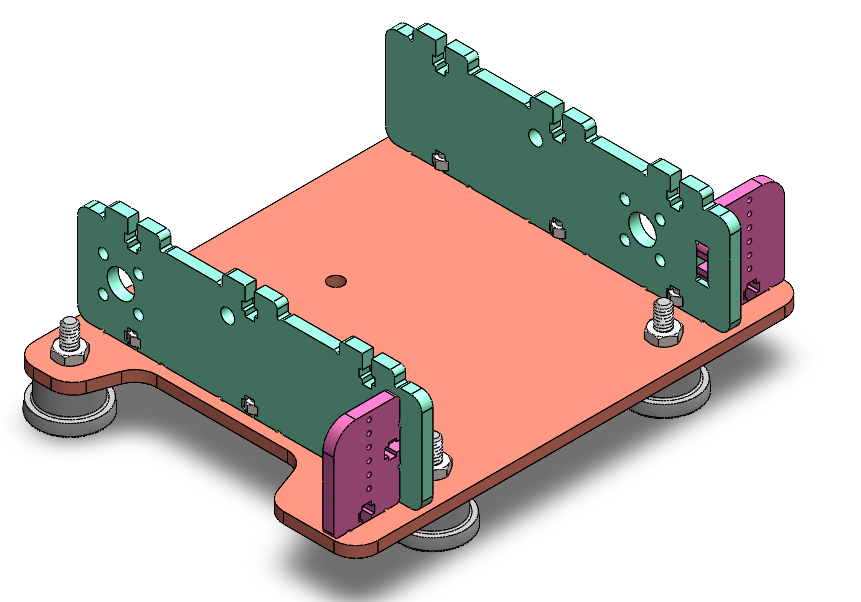
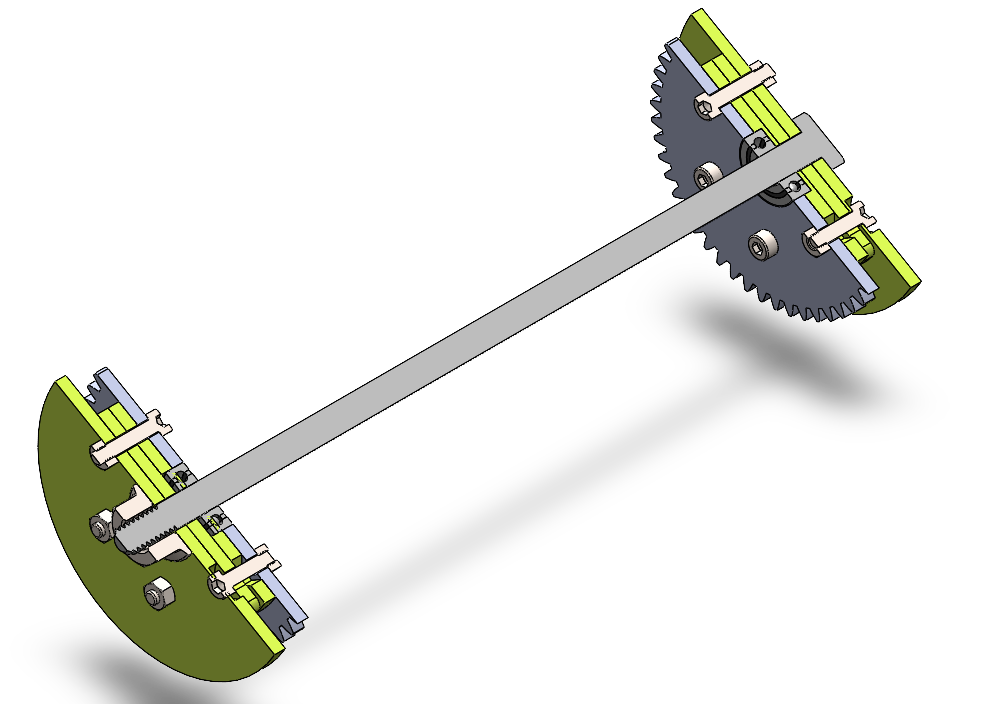
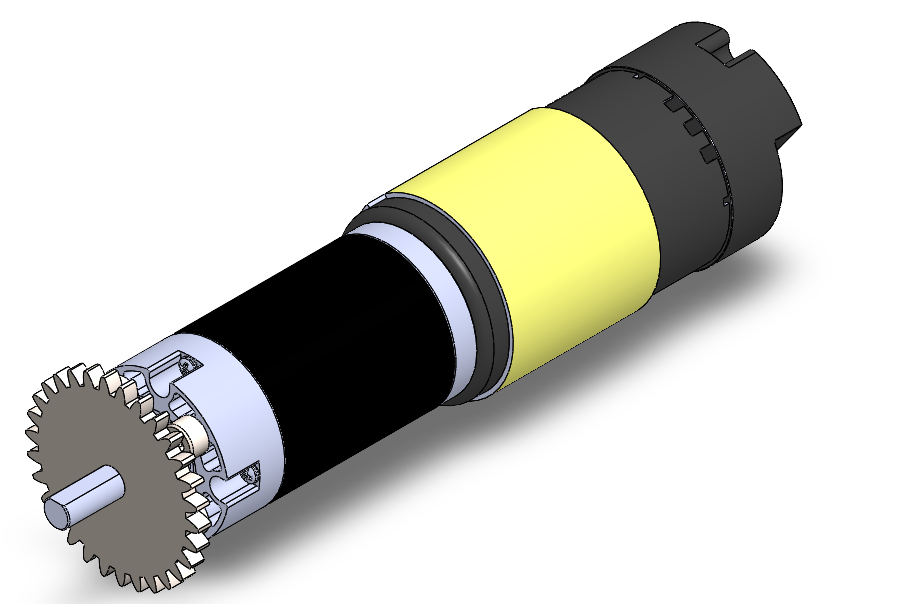
The torque and rope tension calculations from the previous design iteration should be sufficient as the robot now weighs less. The current design has three main assemblies which are shown in more detailed views below.